
- 0
- 아두이노
Portfolio Description
아두이노, LDR센서를 이용하여 제작한 태양광 자동 추적기, 솔라 추적기 DIY KIT 입니다.
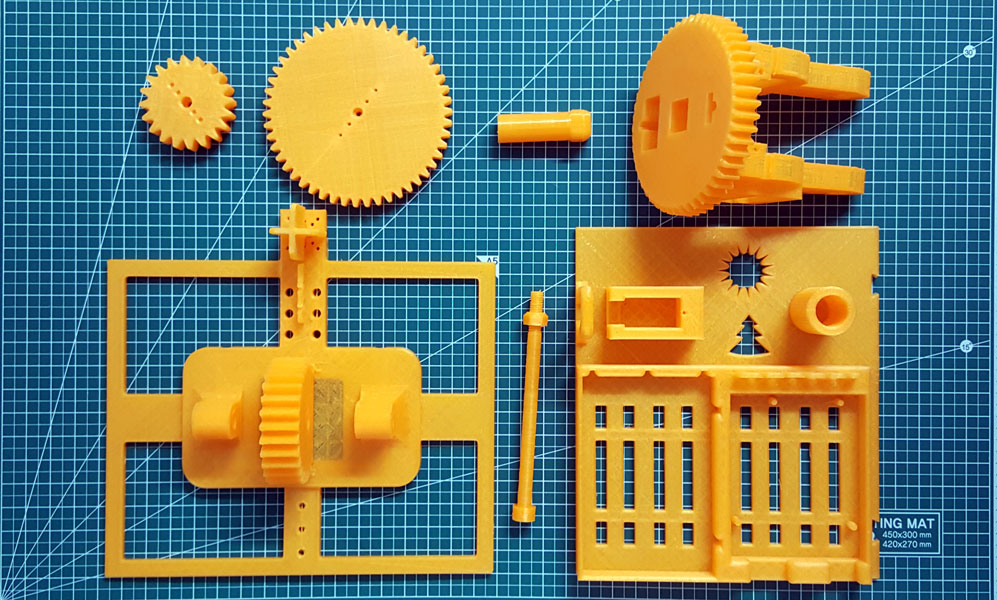
-.디자인, 조립을 최대한 간편하게 할수 있도록 제작된 3D 프린터 출력 키트 입니다.
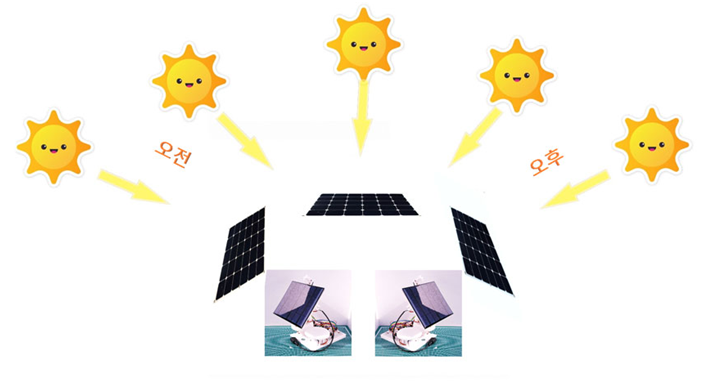
※.태양광 추적기 키트는 태양을 추적해본 결과, 태양광의 위치에 태양광 판넬의 자세 정확도가 아주 좋습니다.
해당 프로그램 응용(수정)하여, 상업용 태양광 추적기를 만드는데 무리가 없을거 같습니다.(제작자본인생각임)
(실사용 대형모델 제작후 엑츄레이터등을 부착하고, 큰부하의 모터를 제어 하면, 실제 태양광 자동 추적기를 만들수 있습니다)
제작된 모델은 2축으로 좌/우.상/하로 태양광을 추적하여 판넬을 최적의 태양광 방향에 위치 하도록 동작합니다,
이 방법을 이용하는 경우
고정형 태양광 충전기에 비해 약18~20%이상의 효율을 낼수 있다고 합니다.
모델 제작은 국내산 PLA소재를 사용하여 3D프린터로 출력하였습니다.
모델1:태양광 자동 추적기.
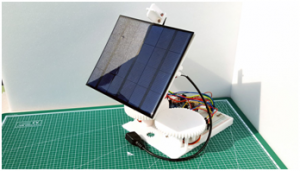
모델2:태양광 자동 추적 충전기 두가지 모델중 충전기 모델은 태양광을 이용 핸드폰을 USB로 직접 충전할수 있는 키트입니다.
-.솔라판넬.6v 3.5w 580ma. Size.165×135cm 1개
-.아두이노우노 R3 1개
-.sg90 서보모터 2개
-.저항 4개
-.ldr센서4개
-.점퍼
-.수축튜브,케이블타이 키트모델 3D 디자인,PLA 소재 FDM 출력.
무한 녹색 에너지 태양광을 사용하는 방법을 체험할수 있는 교육용 DIY 키트 입니다.
오픈마켓에서 구매하세요
네이버쇼핑/옥션/지마켓/11번가/인터파크/쿠팡
검색창에 “에듀아이오티” 검색하세요
More Information
태양광 충전기, 태양광 자동 추적 충전기 3D KIT 만들기
태양광 충전기, 태양광 자동추적기 3D KIT 만들기-v1 PDF 다운로드~ ♣.사용자 기본 지식- 소스 프로그램: 기본적으로 소스는 설치되어 제공되며, 별도의 프로그램 작업은 필요하지 않습니다, 다만 제공되는 소스를 수정하여 프로젝트에 활용하기 위해서는 아두이노 IDE를 컴퓨터에 설치하셔야 합니다.
- 드라이버: 아두이노 우노 드라이버 및 센서의 라이브러리는 다운로드 링크 설명 되어있습니다.

소프트웨어 설명 :CH340 / 시리얼 WINDOWS 드라이버 설치 패키지에 CH341의 USB는 32/64 비트를 지원하는 윈도우 10 / 8.1 / 8/7 / VISTA / XP, 서버 2016/2012/2008 / 2003,2000 / ME / 98

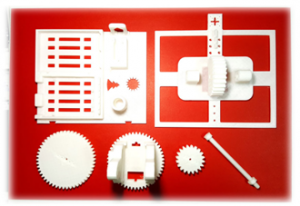
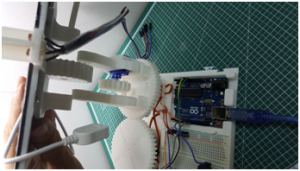
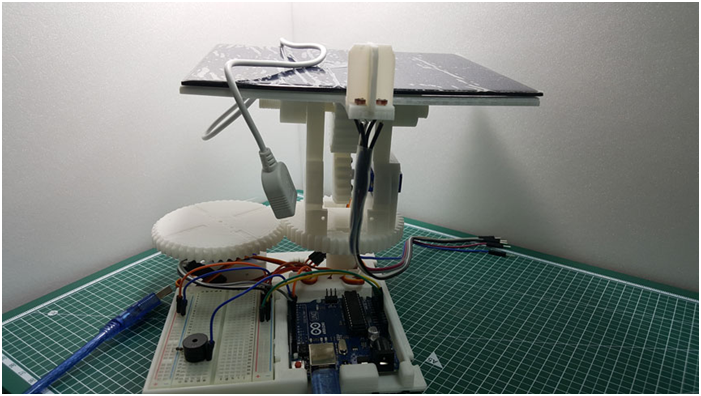
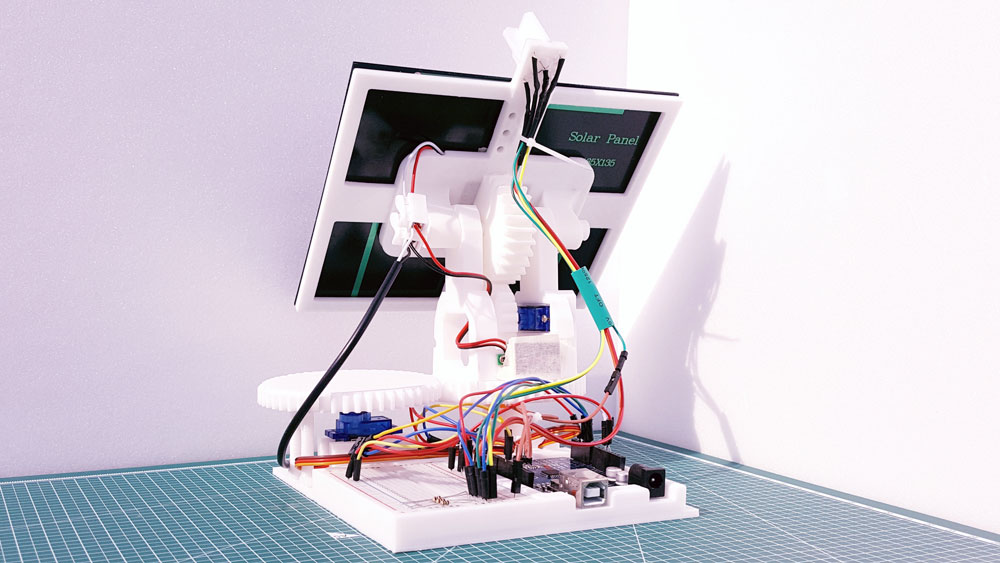
 ♣.아두이노 태양광 추적기, 태양광 충전기 만들기 키트 이미지 입니다
♣.아두이노 태양광 추적기, 태양광 충전기 만들기 키트 이미지 입니다 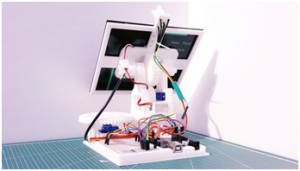
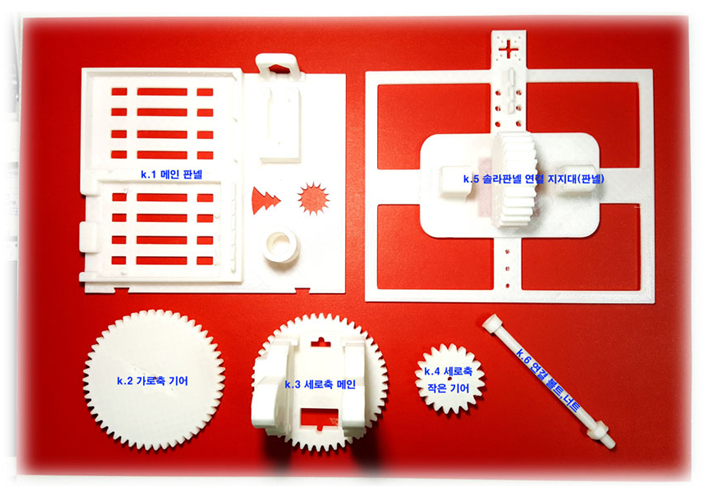
 ♣.아두이노 와 3D 키트 구성품 이미지 입니다.
♣.아두이노 와 3D 키트 구성품 이미지 입니다. 
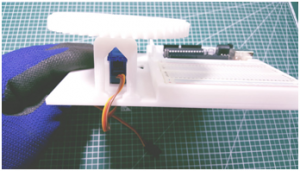
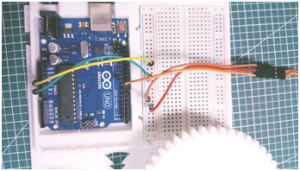
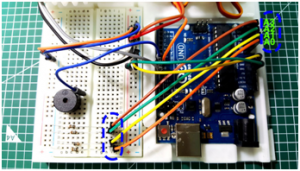
 ☞ 만들기 준비물 : 장갑, 납땜공구, 니퍼, 열풍기(가스라이터), 십자드라이버(중형,소형), 아두이노 전원공급 모듈 -. USB전원 사용가능합니다, PC USB포트, USB 충전기, 휴대용 배터리. ※. 청소년은 납땜(화기사용)할 때 부모님이나 어른들의 도움을 받으세요, 납땜은 위험합니다. ※. 주의 사항 : 조립시에 장갑 착용 납땜, 수축튜브 작업시 화상에 주의, 기어 볼트 조립시에 손주의 하세요. -. 작업시간: 60~90분 태양광 충전기 만들기 키트 에 사용된 소스코드 다운로드 링크 Url 1.아두이노 와 브레드보드를 k.1 메인 판넬 에 장착 합니다.
☞ 만들기 준비물 : 장갑, 납땜공구, 니퍼, 열풍기(가스라이터), 십자드라이버(중형,소형), 아두이노 전원공급 모듈 -. USB전원 사용가능합니다, PC USB포트, USB 충전기, 휴대용 배터리. ※. 청소년은 납땜(화기사용)할 때 부모님이나 어른들의 도움을 받으세요, 납땜은 위험합니다. ※. 주의 사항 : 조립시에 장갑 착용 납땜, 수축튜브 작업시 화상에 주의, 기어 볼트 조립시에 손주의 하세요. -. 작업시간: 60~90분 태양광 충전기 만들기 키트 에 사용된 소스코드 다운로드 링크 Url 1.아두이노 와 브레드보드를 k.1 메인 판넬 에 장착 합니다. 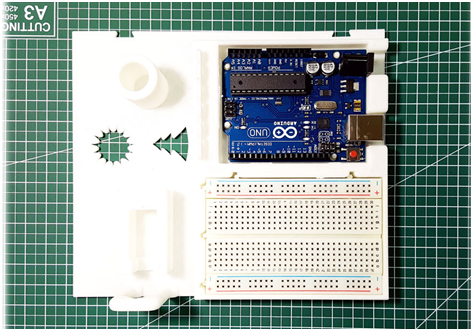
- 가로축(k.2 가로축 기어) 서보모터 조립.
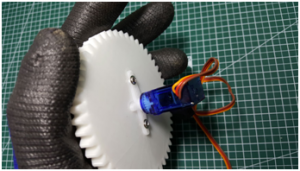
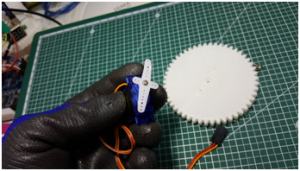
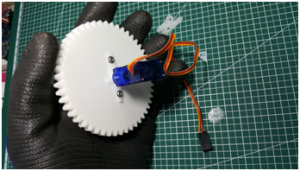
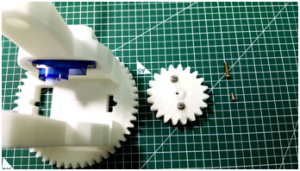
 2-1. 가로축 서보모터 조립입니다. -.SG90서보모터 와 k.2 가로축 기어 를 준비해 주세요
2-1. 가로축 서보모터 조립입니다. -.SG90서보모터 와 k.2 가로축 기어 를 준비해 주세요 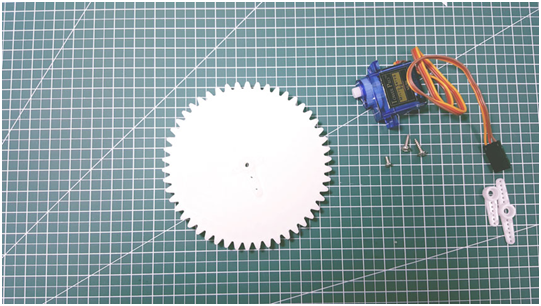 2-1-a. Sg90 서보모터와 연결 프라스틱을 끼우고 서보모터 봉지-작은 너트로 고정 합니다
2-1-a. Sg90 서보모터와 연결 프라스틱을 끼우고 서보모터 봉지-작은 너트로 고정 합니다 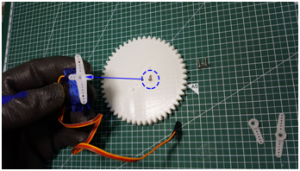
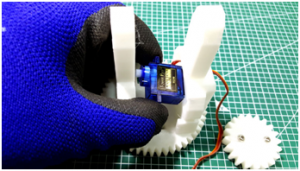
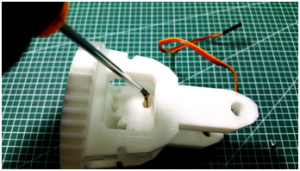
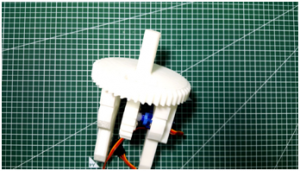
 2-1-b. Sg90 서보모터의 연결 축을 k.2 가로축 기어 에 고정 합니다
2-1-b. Sg90 서보모터의 연결 축을 k.2 가로축 기어 에 고정 합니다 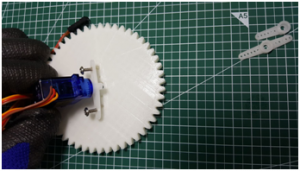
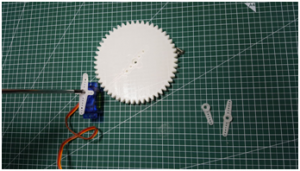
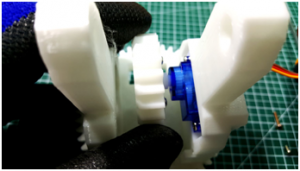
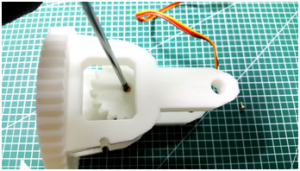
 2-1-c. k.2 가로축 기어 를 k.1 메인 판넬 에 끼워 고정 합니다
2-1-c. k.2 가로축 기어 를 k.1 메인 판넬 에 끼워 고정 합니다 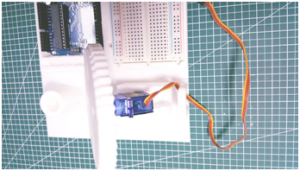
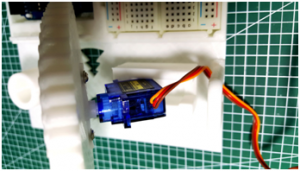
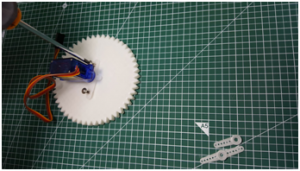
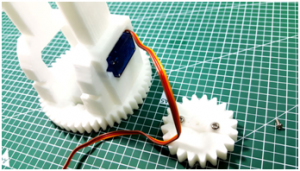
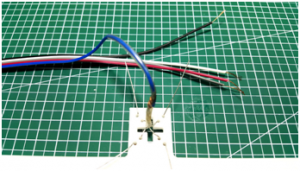
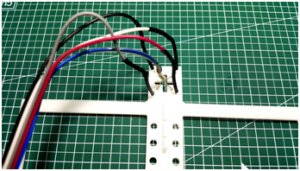
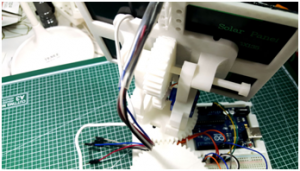
- 가로(좌/우)회전축 서보 모터 연결 및 동작 테스트.
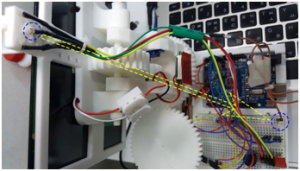
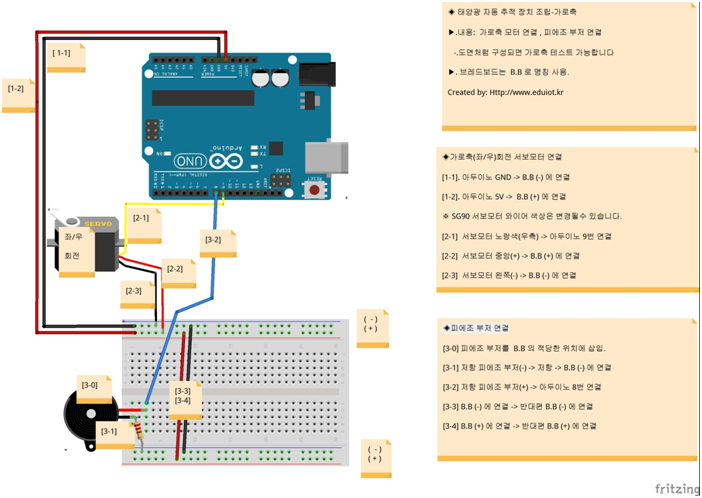 -. 연결을 위한 참고 이미지 입니다.
-. 연결을 위한 참고 이미지 입니다. 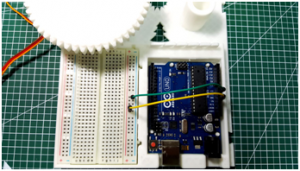
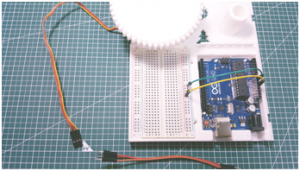

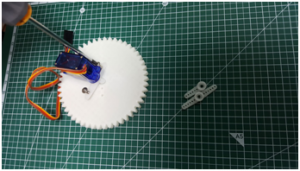
 -.선을 클립에 끼워서 적당히 정리 하세요.
-.선을 클립에 끼워서 적당히 정리 하세요. 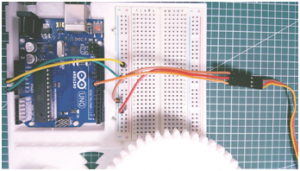
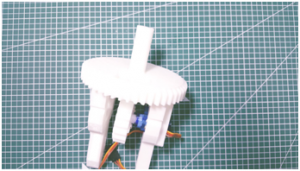
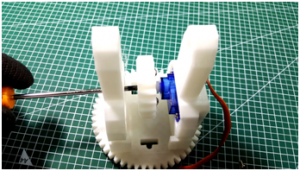
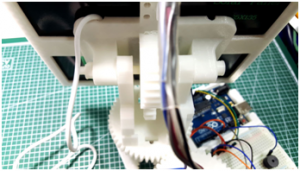
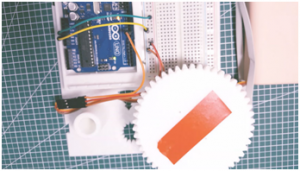 동영상 url : 태양광 추적기 가로(좌/우)회전축 서보 모터 동작 테스트 동영상 보기 4 세로 서보 모터 조립. ♣. 세로축 서보 조립 완성된 사진-미리 보기 이미지 입니다.
동영상 url : 태양광 추적기 가로(좌/우)회전축 서보 모터 동작 테스트 동영상 보기 4 세로 서보 모터 조립. ♣. 세로축 서보 조립 완성된 사진-미리 보기 이미지 입니다. 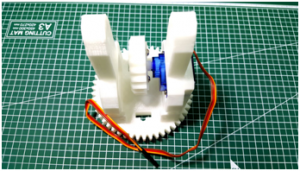
 4-1. 세로축 서보모터 조립입니다. -. SG90서보모터 와 k.4 세로축 작은 기어를 준비해 주세요
4-1. 세로축 서보모터 조립입니다. -. SG90서보모터 와 k.4 세로축 작은 기어를 준비해 주세요 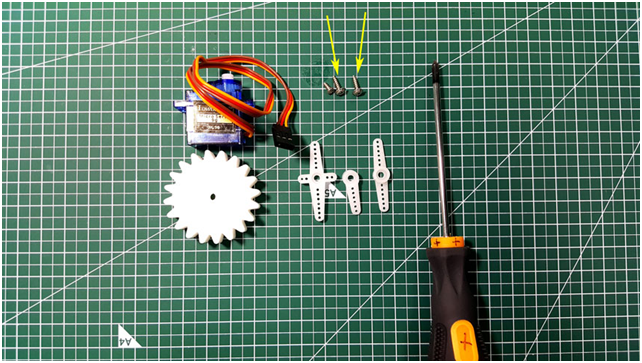 4-1-a. 작은 세로축 기어에 프라스틱을 위치후 너트로 고정 합니다
4-1-a. 작은 세로축 기어에 프라스틱을 위치후 너트로 고정 합니다 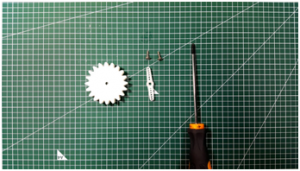
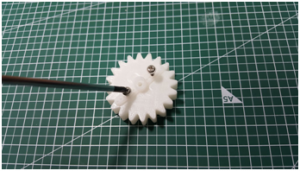 4-1-b. 완성된 모습
4-1-b. 완성된 모습 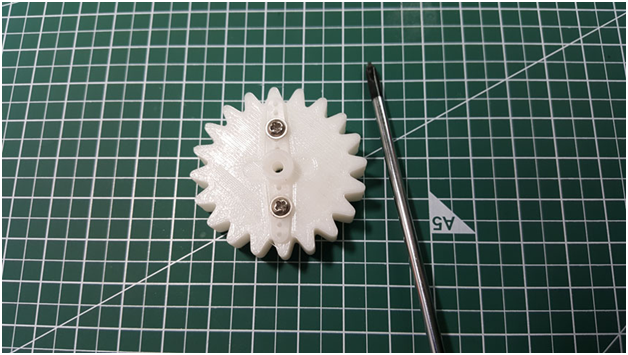 4-2. k.3 세로축 메인 에 Sg90 서보모터를 너트로 고정 합니다 4-2-a. Sg90 서보모터를 k.3 세로축 메인 에 끼워 주세요
4-2. k.3 세로축 메인 에 Sg90 서보모터를 너트로 고정 합니다 4-2-a. Sg90 서보모터를 k.3 세로축 메인 에 끼워 주세요 
 4-2-b. 서보모터를 볼트로 양쪽을 고정 합니다(※볼트는 서보모터 봉지안에 있는거 사용하지 마세요) -별도 제공된 볼트 사용
4-2-b. 서보모터를 볼트로 양쪽을 고정 합니다(※볼트는 서보모터 봉지안에 있는거 사용하지 마세요) -별도 제공된 볼트 사용 
 4-2-c. 양쪽을 고정한 이미지
4-2-c. 양쪽을 고정한 이미지 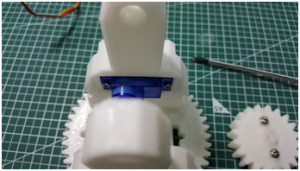
 4-3 세로 기어 고정 4-3-a. Sg90 서보모터에 k.4 세로축 작은 기어를 고정 합니다 ※볼트는 서보모터 봉지안에 있는거 사용 하지 마세요-별도 제공된 볼트 사용
4-3 세로 기어 고정 4-3-a. Sg90 서보모터에 k.4 세로축 작은 기어를 고정 합니다 ※볼트는 서보모터 봉지안에 있는거 사용 하지 마세요-별도 제공된 볼트 사용 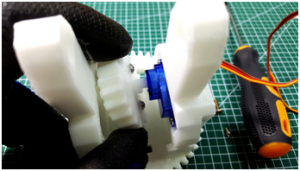
 4-3-a. Sg90 서보모터 축에 볼트로 고정 합니다
4-3-a. Sg90 서보모터 축에 볼트로 고정 합니다 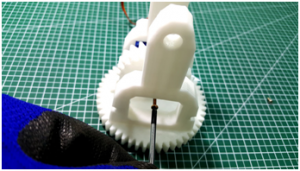
 4-3-b. 세로축 완성된 이미지.
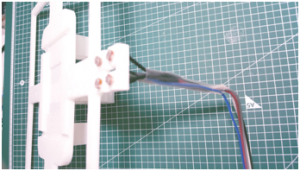
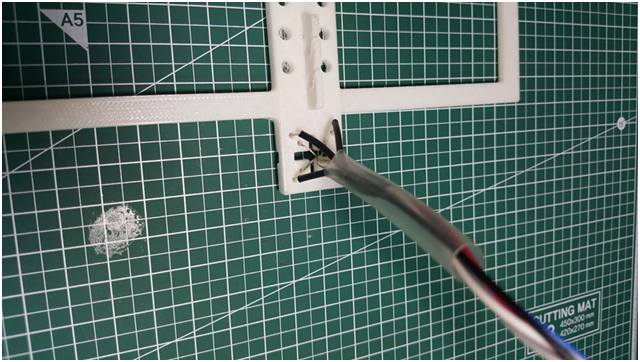
4-3-b. 세로축 완성된 이미지. 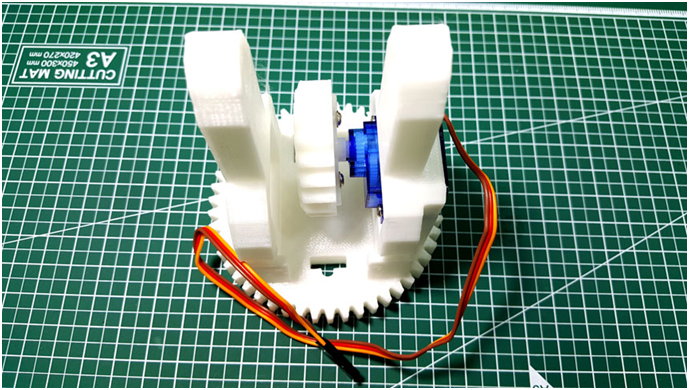 4-4-a. 세로축 핀 삽입.
4-4-a. 세로축 핀 삽입. 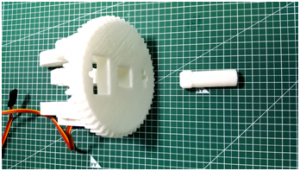
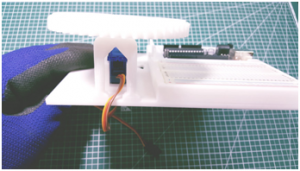
 4-4-b. 세로축을 과 k.1 메인 판넬에 삽입(결합).
4-4-b. 세로축을 과 k.1 메인 판넬에 삽입(결합). 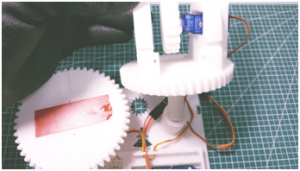
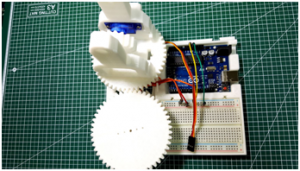
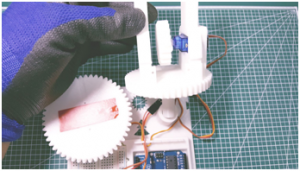 -.선을 클립에 끼워서 적당히 정리 하세요. 4-5. 세로(상/하)회전축 서보 모터 연결 및 동작 테스트. 4-5-1. 아두이노와 브레드보드(B.B)를 아래 도면을 보고 와이어 연결 합니다. ★.와이어를 모두 연결후 아두이노에 전원을 공급하면 가로축+세로축 회전하면서 소리가 출력되면 정상입니다.
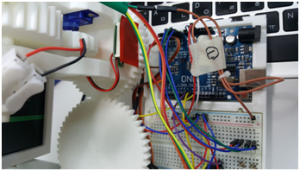
-.선을 클립에 끼워서 적당히 정리 하세요. 4-5. 세로(상/하)회전축 서보 모터 연결 및 동작 테스트. 4-5-1. 아두이노와 브레드보드(B.B)를 아래 도면을 보고 와이어 연결 합니다. ★.와이어를 모두 연결후 아두이노에 전원을 공급하면 가로축+세로축 회전하면서 소리가 출력되면 정상입니다.  -. 연결을 위한 참고 이미지 입니다.
-. 연결을 위한 참고 이미지 입니다. 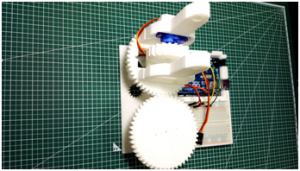
 동영상 url : 태양광 추적기 세로(상/하)회전축 서보 모터 동작 테스트 동영상 보기 5 k.5 솔라판넬에 LDR 센서 조립. ♣. LDR 센서 완성된 사진 - 미리 보기 이미지.
동영상 url : 태양광 추적기 세로(상/하)회전축 서보 모터 동작 테스트 동영상 보기 5 k.5 솔라판넬에 LDR 센서 조립. ♣. LDR 센서 완성된 사진 - 미리 보기 이미지. 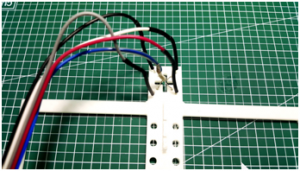
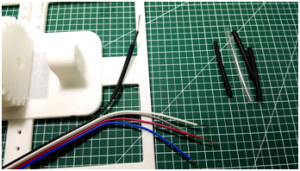
 5-1. LDR 센서 조립입니다. -. LDR센서 4개, 수축튜브, k.5 솔라판넬 연결 지지대 를 준비해 주세요
5-1. LDR 센서 조립입니다. -. LDR센서 4개, 수축튜브, k.5 솔라판넬 연결 지지대 를 준비해 주세요 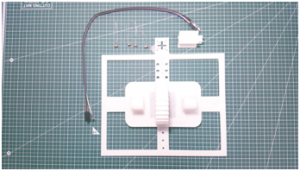
 5-1-a. LDR 센서 4개를 k.5 솔라판넬 연결 지지대 전면에서 삽입하세요
5-1-a. LDR 센서 4개를 k.5 솔라판넬 연결 지지대 전면에서 삽입하세요 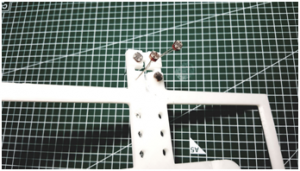
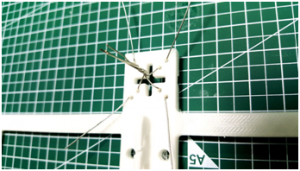
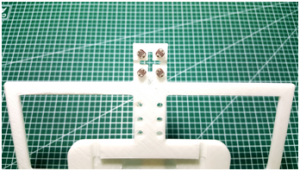 5-1-b. 후면에서 LDR 센서 안쪽 구멍에 있는 4개를 한꺼번에 꼬아 주세요.
5-1-b. 후면에서 LDR 센서 안쪽 구멍에 있는 4개를 한꺼번에 꼬아 주세요. ※. 꼬아진 4개는 나중에 B.B의 (+)에 연결 합니다
 5-2-a. 수수(또는 암수) 와이어 준비 (수) 와이어핀을 남기고 한쪽을 컷팅합니다. ※.B.B 와 연결할 때 연장 와이어 핀 방향을 확인후 컷팅 하세요.
5-2-a. 수수(또는 암수) 와이어 준비 (수) 와이어핀을 남기고 한쪽을 컷팅합니다. ※.B.B 와 연결할 때 연장 와이어 핀 방향을 확인후 컷팅 하세요. 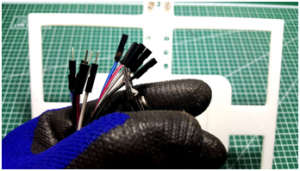
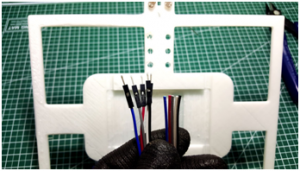 5-2-a. 와이어스트리퍼롤 피복을 벗겨주세요 – 5 핀. ※. 4핀은 상좌/상우-하좌/하우 방향 - 나머지 1핀은 (+극연결) 꼬아진 중앙 연결선 = 전체 5핀
5-2-a. 와이어스트리퍼롤 피복을 벗겨주세요 – 5 핀. ※. 4핀은 상좌/상우-하좌/하우 방향 - 나머지 1핀은 (+극연결) 꼬아진 중앙 연결선 = 전체 5핀 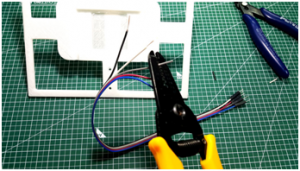
 5-2-b. LDR 센서에 5 핀 을 남땜 합니다 -. 4핀은 상좌/상우-하좌/하우 방향 - 나머지 1핀은 (+극연결) 꼬아진 중앙 연결선 = 전체 5핀 ★. 각핀의 와이어 위치 꼭 기억 또는 라벨 부착 권장.(이거 안하면 다음 핀 연결에서 고생할수 있습니다)
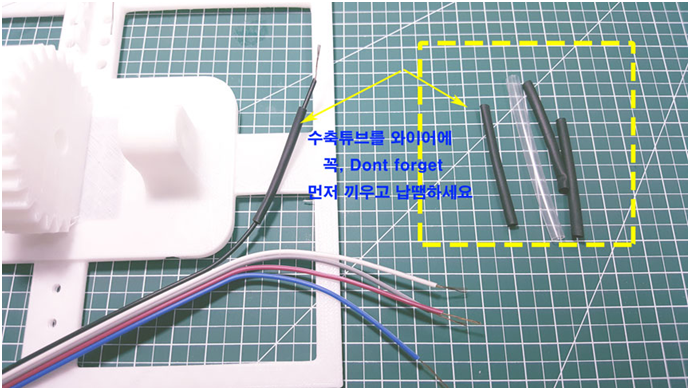
5-2-b. LDR 센서에 5 핀 을 남땜 합니다 -. 4핀은 상좌/상우-하좌/하우 방향 - 나머지 1핀은 (+극연결) 꼬아진 중앙 연결선 = 전체 5핀 ★. 각핀의 와이어 위치 꼭 기억 또는 라벨 부착 권장.(이거 안하면 다음 핀 연결에서 고생할수 있습니다) ※ 납땜전에 수축튜브 먼저 끼우고 납땜 하세요
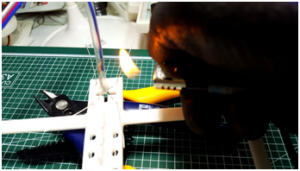
 5-2-c. 5개 남땜후 수축튜브에 열풍기 사용 (없는 경우 라이터 활용가능, 권장안함)-장갑사용. ※.화재, 불에 손조심 하시기 바랍니다, 청소년은 부모님또는 어른의 도움을 받으세요.
5-2-c. 5개 남땜후 수축튜브에 열풍기 사용 (없는 경우 라이터 활용가능, 권장안함)-장갑사용. ※.화재, 불에 손조심 하시기 바랍니다, 청소년은 부모님또는 어른의 도움을 받으세요. 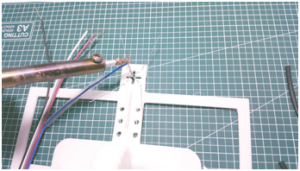
 5-2-d. 5 핀 와이어에 가장큰 수축 튜브를 끼워서 열풍기로 수축 합니다. ※. 5개의 작은 와이어 연결 납땜, 수축튜브 끼우는 작업후 -> 5개 전체를 끼우는 큰 수축튜브는 끼워만 두시고, 센서 테스트 마무리후 수축 하시는게 좋습니다(권장) – 아래 사진 참조.
5-2-d. 5 핀 와이어에 가장큰 수축 튜브를 끼워서 열풍기로 수축 합니다. ※. 5개의 작은 와이어 연결 납땜, 수축튜브 끼우는 작업후 -> 5개 전체를 끼우는 큰 수축튜브는 끼워만 두시고, 센서 테스트 마무리후 수축 하시는게 좋습니다(권장) – 아래 사진 참조. 
 5-3-a. LDR 센서 를 브레드 보드에 연결 하기. ※. 선이 바뀌면 센서 값의 계산 오류로 인해서 방향 회전이 잘 안됩니다.
5-3-a. LDR 센서 를 브레드 보드에 연결 하기. ※. 선이 바뀌면 센서 값의 계산 오류로 인해서 방향 회전이 잘 안됩니다. 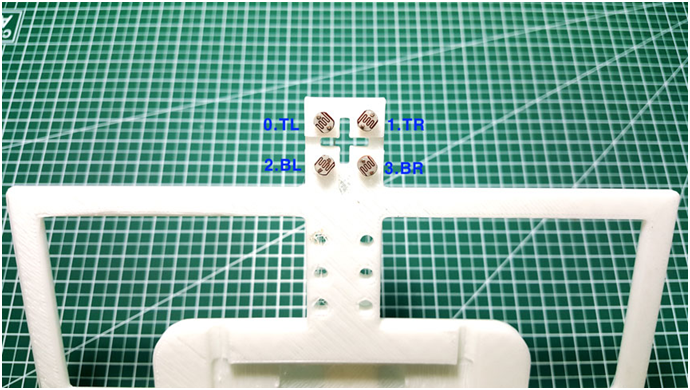 5-4-a. 양면테이프 스티커 제거후 솔라 판넬을 부착합니다.
5-4-a. 양면테이프 스티커 제거후 솔라 판넬을 부착합니다. 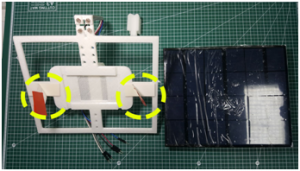
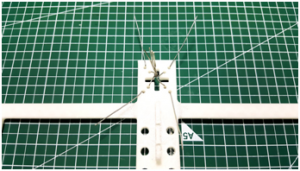
 5-4-b. LDR 센서 빛분리 가이드 삽입 합니다.
5-4-b. LDR 센서 빛분리 가이드 삽입 합니다. 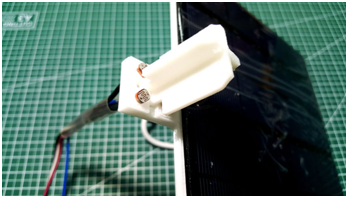 5-4-c. k.3 세로축 메인 에 k.5 솔라판넬 연결 지지대(판넬) 연결 고정. ※ k.7 연결 볼트 좌우로(구부리지말것) (좌/우)힘을 가하지 마세요, PLA소재 이기 때문에 부러 질수 있습니다.
5-4-c. k.3 세로축 메인 에 k.5 솔라판넬 연결 지지대(판넬) 연결 고정. ※ k.7 연결 볼트 좌우로(구부리지말것) (좌/우)힘을 가하지 마세요, PLA소재 이기 때문에 부러 질수 있습니다. 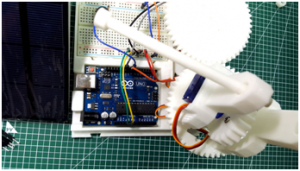
 5-5 LDR 센서 와 아두이노 연동 조립. ♣. LDR 센서 연동 연결 완성된 사진 - 미리 보기.
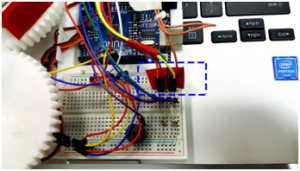
5-5 LDR 센서 와 아두이노 연동 조립. ♣. LDR 센서 연동 연결 완성된 사진 - 미리 보기. 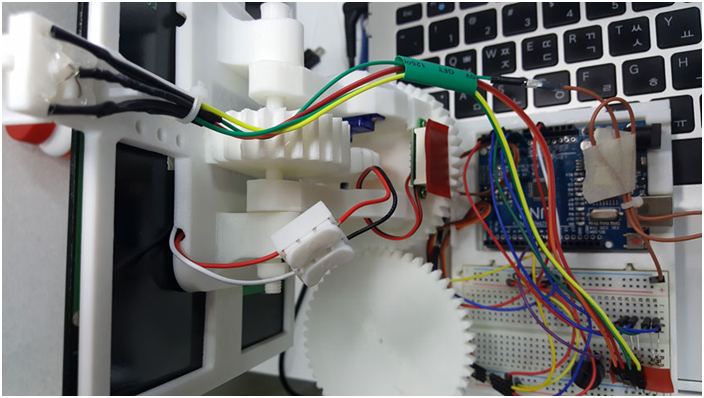 5-6. LDR 센서 연결 및 동작 테스트. -. 아래 도면을 보고 와이어 연결 합니다. ★. 와이어를 모두 연결후 아두이노에 전원을 공급하면 가로+세로축 회전, 소리가 출력, 회전축이 빛의 방향을 따라서 회전하는지 테스트 하세요. 빛의 방향대로 판넬이 향하지 않는 경우 센서의 핀의 위치를 확인후 아두이노 전원을 Rebooting 하세요.
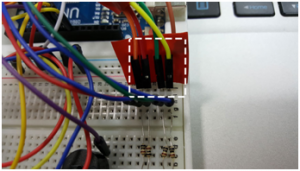
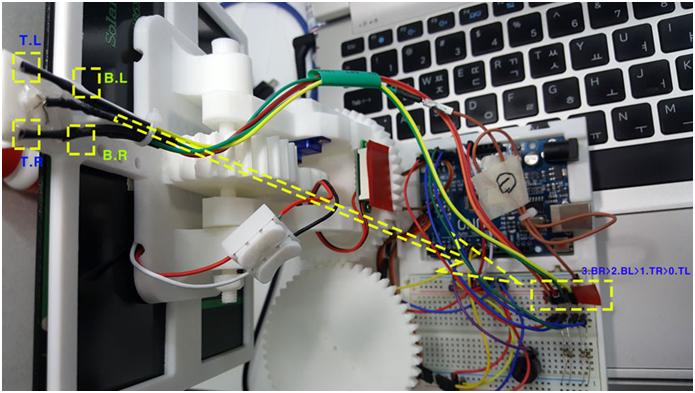
5-6. LDR 센서 연결 및 동작 테스트. -. 아래 도면을 보고 와이어 연결 합니다. ★. 와이어를 모두 연결후 아두이노에 전원을 공급하면 가로+세로축 회전, 소리가 출력, 회전축이 빛의 방향을 따라서 회전하는지 테스트 하세요. 빛의 방향대로 판넬이 향하지 않는 경우 센서의 핀의 위치를 확인후 아두이노 전원을 Rebooting 하세요. 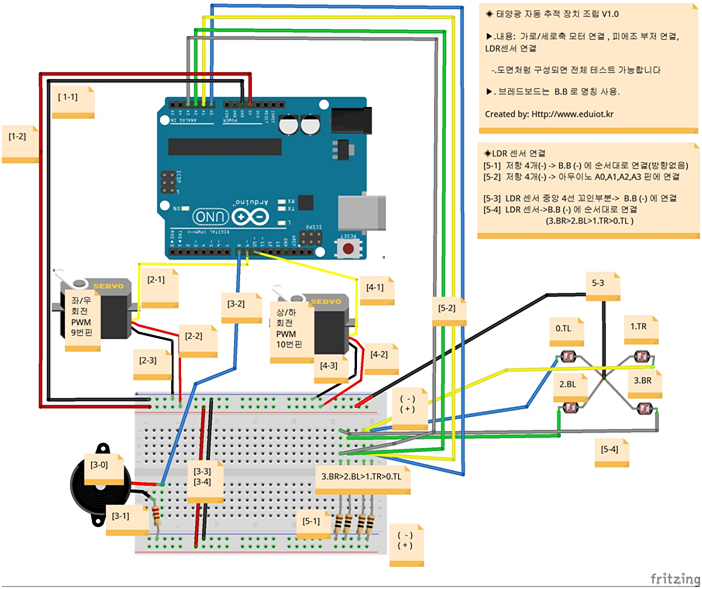 5-6-1. 저항 연결. -.저항 4개의 한쪽은 B.B의 (-)극에 연결 [풀다운] -.4개의 꼬인선은 브레드보드의 (+) 에 연결 합니다. TL=>A0, TR=> A1 (-) 연결 BL=>A2, BR=> A3 (-) 연결
5-6-1. 저항 연결. -.저항 4개의 한쪽은 B.B의 (-)극에 연결 [풀다운] -.4개의 꼬인선은 브레드보드의 (+) 에 연결 합니다. TL=>A0, TR=> A1 (-) 연결 BL=>A2, BR=> A3 (-) 연결 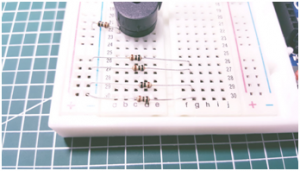
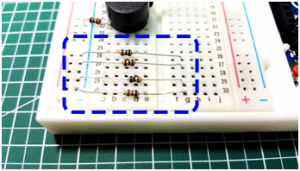 5-6-2. 저항과 아두이노 연결- -. 저항과 -> 아두이노 아날로그 단자 에 연결. TL=>A0, TR=> A1, BL=>A2, BR=> A3 (-) 연결
5-6-2. 저항과 아두이노 연결- -. 저항과 -> 아두이노 아날로그 단자 에 연결. TL=>A0, TR=> A1, BL=>A2, BR=> A3 (-) 연결 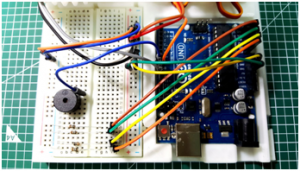
 5-6-3. . LDR 센서 TL=>A0, TR=> A1, BL=>A2, BR=> A3 (-) 을 B.B 의 (-)에 연결 -. LDR 센서 (4개의 핀 꼬인부분) 을 B.B 의 (+)에 연결 합니다
5-6-3. . LDR 센서 TL=>A0, TR=> A1, BL=>A2, BR=> A3 (-) 을 B.B 의 (-)에 연결 -. LDR 센서 (4개의 핀 꼬인부분) 을 B.B 의 (+)에 연결 합니다 
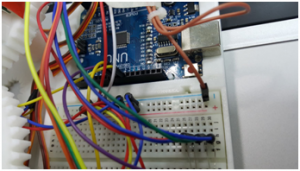 5-6-4. LDR 센서 를 B.B 에 순서 대로 연결 (전면의 방향)
5-6-4. LDR 센서 를 B.B 에 순서 대로 연결 (전면의 방향) 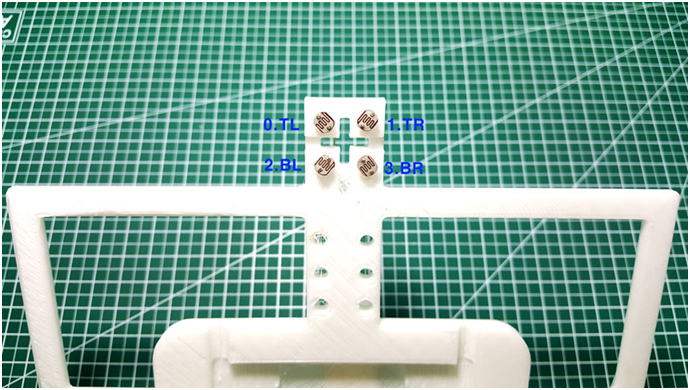 // LDR pin 연결 => 아날로그 핀(analogpin); A0 = 0; //LDR 좌측-상 (0.TL) A1 = 1; //LDR 우측-상 (1.TR) A2 = 2; //LDR 좌측-하 (2.BL) A3 = 3; //LDR 우측-상 (3.BR) -.후면의 방향에서
// LDR pin 연결 => 아날로그 핀(analogpin); A0 = 0; //LDR 좌측-상 (0.TL) A1 = 1; //LDR 우측-상 (1.TR) A2 = 2; //LDR 좌측-하 (2.BL) A3 = 3; //LDR 우측-상 (3.BR) -.후면의 방향에서 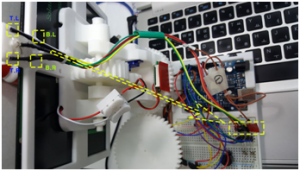

TL=>A0, TR=> A1, BL=>A2, BR=> A3
수고 하셨습니다
판넬의 초기 위치(방향)
아두이노에 전원 공급하면 상하/좌우 회전을 합니다
약 5초 정도 지난후 도레미~~비슷한 신호음이 울리면
전원을 Off 하시고 판넬을 아래의 그림처럼 위치 하고 다시 전원을 공급하세요.
 ※ 당사 제품구매 고객께서는 프로젝트에 링크된 소스를 사용하지 마시고 아래의 제품에 사용된 소스코드를 사용하세요. 소재: 국내산 PLA. 방식: FDM 키트출력시간: 21시간 30분
※ 당사 제품구매 고객께서는 프로젝트에 링크된 소스를 사용하지 마시고 아래의 제품에 사용된 소스코드를 사용하세요. 소재: 국내산 PLA. 방식: FDM 키트출력시간: 21시간 30분 Portfolio Details
-
Client:
관련제품보기 - http://eduiot.co.kr/shop/
-
Skills:
아두이노솔라추적기태양열 추적기태양광추적기








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}